Wyłącznik krańcowy poziomy dźwigni zawiasowej

-

Wytrzymała obudowa
-

Niezawodna akcja
-

Lepsze życie
Opis produktu
Poziome wyłączniki krańcowe serii RL7 firmy Renew zostały zaprojektowane z myślą o większej trwałości i odporności na trudne warunki otoczenia, z żywotnością mechaniczną do 10 milionów operacji, dzięki czemu nadają się do zadań o krytycznym znaczeniu i dużej intensywności użytkowania, gdzie standardowe wyłączniki podstawowe nie mogą być stosowane. Przełącznik z dźwignią przegubową zapewnia większy zasięg i elastyczność działania, umożliwiając łatwą aktywację i idealnie sprawdza się w zastosowaniach, w których ograniczenia przestrzenne lub nietypowe kąty utrudniają bezpośrednią aktywację.
Wymiary i charakterystyki operacyjne
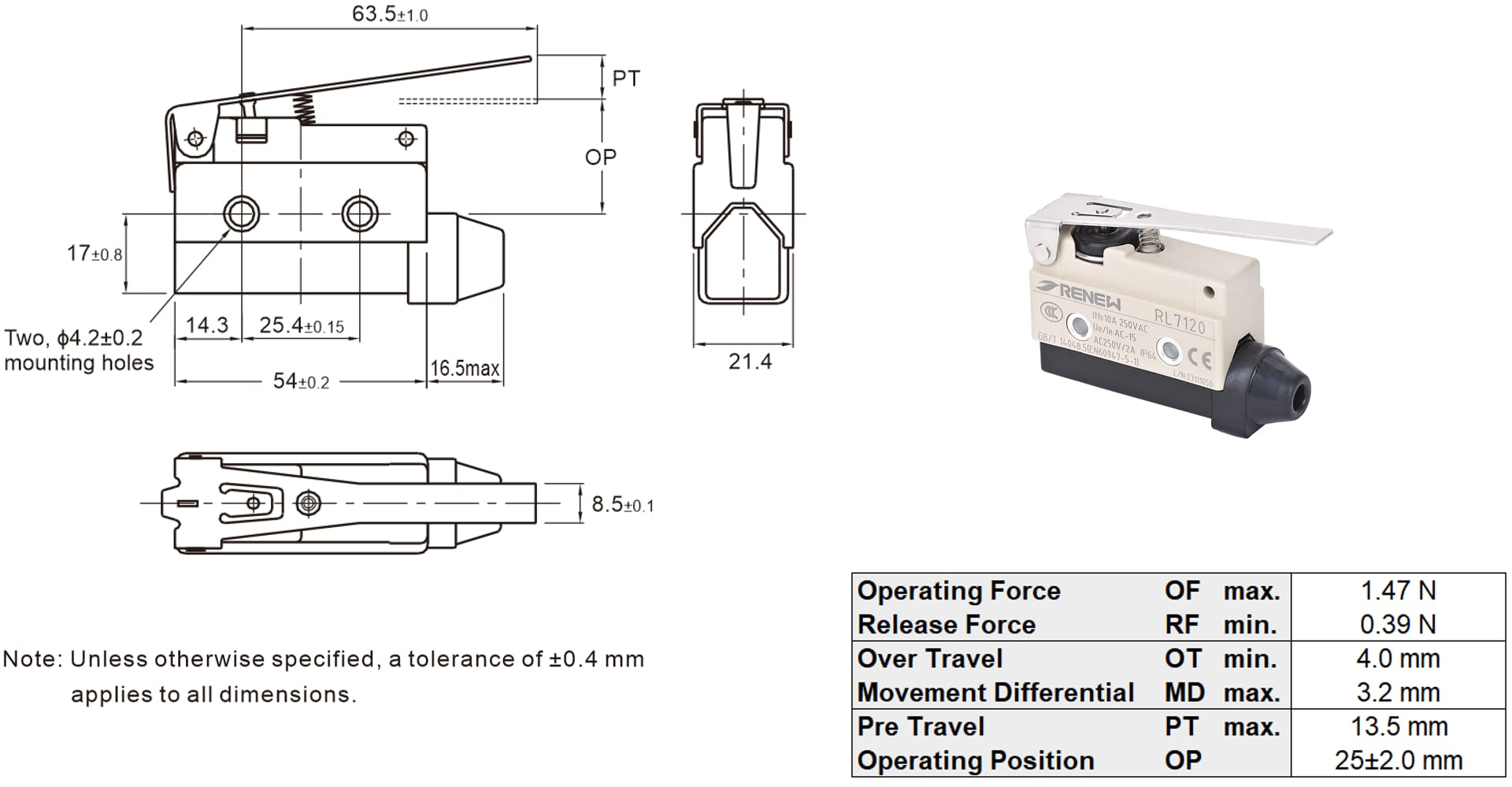
Ogólne dane techniczne
| Prąd znamionowy | 10 A, 250 V AC |
| Rezystancja izolacji | 100 MΩ min. (przy 500 V DC) |
| Rezystancja styku | 15 mΩ maks. (wartość początkowa dla wbudowanego przełącznika, testowanego osobno) |
| Wytrzymałość dielektryczna | Między stykami o tej samej biegunowości 1000 V AC, 50/60 Hz przez 1 min |
| Między częściami metalowymi przewodzącymi prąd a uziemieniem oraz między każdym zaciskiem a częściami metalowymi nieprzewodzącymi prądu 2000 V AC, 50/60 Hz przez 1 min | |
| Odporność na wibracje w przypadku awarii | 10 do 55 Hz, podwójna amplituda 1,5 mm (niesprawność: maks. 1 ms) |
| Żywotność mechaniczna | 10 000 000 operacji min. (50 operacji/min) |
| Życie elektryczne | 200 000 operacji min. (przy obciążeniu znamionowym, 20 operacji/min) |
| Stopień ochrony | Uniwersalne zastosowanie: IP64 |
Aplikacja
Poziome wyłączniki krańcowe Renew odgrywają kluczową rolę w zapewnieniu bezpieczeństwa, precyzji i niezawodności różnych urządzeń w różnych dziedzinach. Oto kilka popularnych lub potencjalnych zastosowań.
Przegubowe ramiona robota i chwytaki
Zintegrowane z chwytakami nadgarstków robotów w celu wykrywania siły chwytu i zapobiegania nadmiernemu wyprostowi, a także zintegrowane z przegubowymi ramionami robotów w celu stosowania w zespołach sterujących, zapewniają prowadzenie na końcu drogi i w formie siatki.
Kategorie produktów
-

Przełącznik podstawowy z popychaczem rolkowym do montażu na panelu
-

Wyłącznik krańcowy poziomy z krótką dźwignią zawiasową
-

Krótki poziomy wyłącznik krańcowy z tłokiem sprężynowym
-

Uszczelniony wyłącznik krańcowy tłoka rolkowego
-

Wyłącznik krańcowy drgań cewki końcówki drutu
-

Przełącznik podstawowy dźwigni rolkowej zawiasu







